Pythonとは
基本的な使い方
・
IDLE
・
Jupyter Notebook
・
Markdown
・
コマンドプロンプトで実行
・
仮想環境の構築
・
仮想環境でIDLEを実行 ライブラリのインストール
・
pipの使い方
・
numpy , matplotlib等
・
graphviz
・
pytorch
・
Mecab Pythonの関数:
一覧
共通関数
・
append , extend
・
class
・
copy
・
csv.reader
・
csv.writer
・
def , return
・
dict , defaultdict
・
enumerate
・
exit
・
for
・
if
・
import
・
in
・
input
・
lambda
・
len
・
list
・
min/max
・
OrderedDict
・
open/close
・
os
・
pickle
・
print
・
range
・
re.split
・
read/readline
・
round/floor/ceil
・
split
・
sys.argv
・
time
・
while
・
write
・
zip
・特殊メソッド
・
__name__
・
__iter__ , __next__
・
正規表現、メタ文字
・
データの型の種類
・
四則演算 (+ , - , * , /)
・
コメントアウト (# , ''') numpy
・
append
・
arange
・
argmax/argmin
・
array
・
asfarray
・
astype , dtype
・
digitize
・
dot
・
hstack/vstack
・
linalg.solve
・
linspace
・
max,min
・
mean
・
meshgrid
・
mgrid
・
ndim
・
ndmin
・
pad
・
poly1d
・
polyfit
・
prod
・
random
・
reshape
・
savetxt/loadtxt
・
shape
・
std
・
transpose
・
where
・
zeros/zeros_like scipy
・
expit
・
imread
・
interpolate
・
signal.square, sawtooth matplotlib
・
contour
・
imshow
・
figure
・
pcolormesh
・
plot
・
quiver
・
scatter scikit-learn
・
GaussianNB
・
KMeans
・
KNeighborsClassifier
・
SVC
・
tree chaospy keras chainer chainerrl pandas
・
データ抽出
・
concat
・
DataFrame
・
read_excel pytorch
・
BCELoss , MSELoss
・
Embedding
・
device
・
Sequential
・
Dataset, Dataloader
・
RNN, LSTM OpenAI gym
・
Blackjack-v0
・
CartPole-v0 seaborn
・
pairplot tkinter
・
frame, grid
・
画像表示
・
画像を切り取り表示
・
画像を保存 目的別
・
ステップ関数
・
矩形波, 三角波
・
1 of K 符号化法
・
線形補間
・
配列に番号をつける
・
ベクトル場を描く
・
線形回帰, 多項式回帰
・
Bluetooth接続
公開日:2020/4/16 , 最終更新日:2021/1/19
・In English
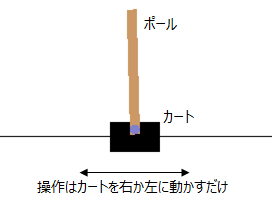
■CartPole-v0の説明
倒立振子のゲームを行います。以下の様にカートの上にポールが立った状態でスタートし、ポールが立ったままの状態を維持するように、カートを左右に動かします。
■CartPole-v0を使った具体例
簡単な動作方法は以下。このゲームを強化学習の題材に使う事例はこちら で説明。OpenAI gym , numpyのインストール方法はこちら 。
import gym# Cartpole定義 # Cartpoleの状態初期化 # Cartpoleのアニメーション # カートを動かし、結果を返す
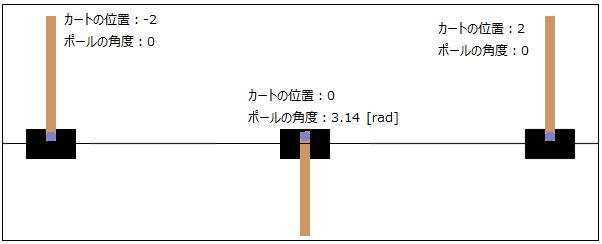
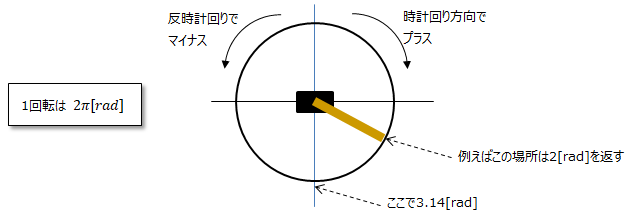
<カートの操作:env.step> <カートとポールの状態:observation> <報酬獲得条件:reward=1> <ゲーム終了条件:done=True>
サブチャンネルあります。⇒ 何かのお役に立てればと
Pythonとは
基本的な使い方
・
IDLE
・
Jupyter Notebook
・
Markdown
・
コマンドプロンプトで実行
・
仮想環境の構築
・
仮想環境でIDLEを実行 ライブラリのインストール
・
pipの使い方
・
numpy , matplotlib等
・
graphviz
・
pytorch
・
Mecab Pythonの関数:
一覧
共通関数
・
append , extend
・
class
・
copy
・
csv.reader
・
csv.writer
・
def , return
・
dict , defaultdict
・
enumerate
・
exit
・
for
・
if
・
import
・
in
・
input
・
lambda
・
len
・
list
・
min/max
・
OrderedDict
・
open/close
・
os
・
pickle
・
print
・
range
・
re.split
・
read/readline
・
round/floor/ceil
・
split
・
sys.argv
・
time
・
while
・
write
・
zip
・特殊メソッド
・
__name__
・
__iter__ , __next__
・
正規表現、メタ文字
・
データの型の種類
・
四則演算 (+ , - , * , /)
・
コメントアウト (# , ''') numpy
・
append
・
arange
・
argmax/argmin
・
array
・
asfarray
・
astype , dtype
・
digitize
・
dot
・
hstack/vstack
・
linalg.solve
・
linspace
・
max,min
・
mean
・
meshgrid
・
mgrid
・
ndim
・
ndmin
・
pad
・
poly1d
・
polyfit
・
prod
・
random
・
reshape
・
savetxt/loadtxt
・
shape
・
std
・
transpose
・
where
・
zeros/zeros_like scipy
・
expit
・
imread
・
interpolate
・
signal.square, sawtooth matplotlib
・
contour
・
imshow
・
figure
・
pcolormesh
・
plot
・
quiver
・
scatter scikit-learn
・
GaussianNB
・
KMeans
・
KNeighborsClassifier
・
SVC
・
tree chaospy keras chainer chainerrl pandas
・
データ抽出
・
concat
・
DataFrame
・
read_excel pytorch
・
BCELoss , MSELoss
・
Embedding
・
device
・
Sequential
・
Dataset, Dataloader
・
RNN, LSTM OpenAI gym
・
Blackjack-v0
・
CartPole-v0 seaborn
・
pairplot tkinter
・
frame, grid
・
画像表示
・
画像を切り取り表示
・
画像を保存 目的別
・
ステップ関数
・
矩形波, 三角波
・
1 of K 符号化法
・
線形補間
・
配列に番号をつける
・
ベクトル場を描く
・
線形回帰, 多項式回帰
・
Bluetooth接続