
 エンジン, パワートレイン
・ 1サイクルの燃料量
・ BSCF
・ IMEP , BMEP
・ ハイブリッドシステム
車両運動
・ 車の加速度の求め方
・ トルクと出力の関係
・ 回転数と車速の関係
・ PWR, PMR
・ タイヤサイズ
・ ディスクブレーキ
・ 走行抵抗
・ コーナリングフォース
・ ピッチ, ロール, ヨー
・ 旋回半径
認証試験,法規制
・ WLTP , WLTC
・ 各国認証試験モード
・ CD, CSモード
・ 2サイクル, 5サイクル試験
・ OBD
・ 法規制, 規格
・ モデルイヤー
・ AC電費, DC電費
ISO
・ ISOとは
・ ISO9001
・ ISO15288
・ ISO27001
・ A-SPICE
部品, その他
・ バッテリーの容量
・ バッテリーの充電時間
・ バッテリー関連用語
・ オルタネータ
・ エアコンの原理
・ 普通充電, 急速充電
・ フェイルセーフ,フールプルーフ
・ ギアの種類, スプライン
・ ラジアル, スラスト
・ バックラッシュ
・ TL,BL,WL方向
・ デフ(差動装置), LSD
・ IQS, NCBS
生産技術
・ 溶接
・ 成形, 加工
|
・In English
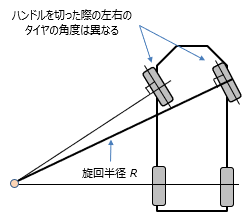
■旋回半径の定義
ハンドルを切った際の前方左右のタイヤの切れ角は若干異なり、内輪の方ががより角度をつけています。もし外輪と内輪のタイヤの角度が同じの場合、回転半径が異なるためタイヤがスリップしてしまいます。
外輪と内輪の切れ角の差をつける事を考案者のアッカーマンという人の名前を取ってアッカーマンジオメトリといいますが、
こうすることで左右のタイヤの垂直方向に線を引いた時の交点が旋回の中心となり、外側のタイヤと旋回の中心との距離を旋回半径と定義します。
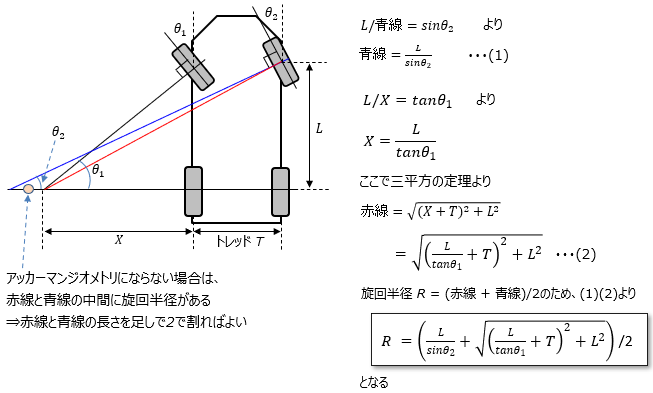
■旋回半径の求め方
<極低車速の場合>
実際はアッカーマンジオメトリにならない場合が多く、以下図の様に旋回中心がずれ、赤線と青線を足して2で割った値が旋回半径となります。
赤線は内輪から垂直に引いた線の交点から、外輪の中心に向かって引いた線となり、外輪から垂直に引いた線とは異なります。Lはホイールベース、Tはトレッドで、車両のスペックから解り、θはハンドルの舵角から解ります。この時の旋回半径を最小回転半径といいます。
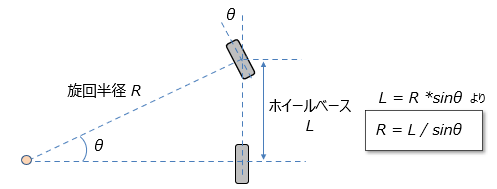
<簡易的に求める方法>
簡易的に求める場合は外輪の状態のみで考えます。旋回半径Rは以下のとおり。
<定常旋回の場合>
車速が上がると遠心力が加わり、タイヤの外向きに微小なスリップ角が付き、この角度が車の進行方向になります。
また以下図のとおり、タイヤの旋回中心も極低車速の時に比べて少し上にずれます。
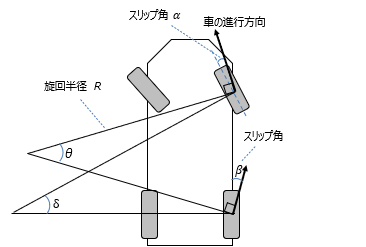
この時の旋回半径Rは以下のとおり。分かりやすくするために簡略図化して補助線も引いています。
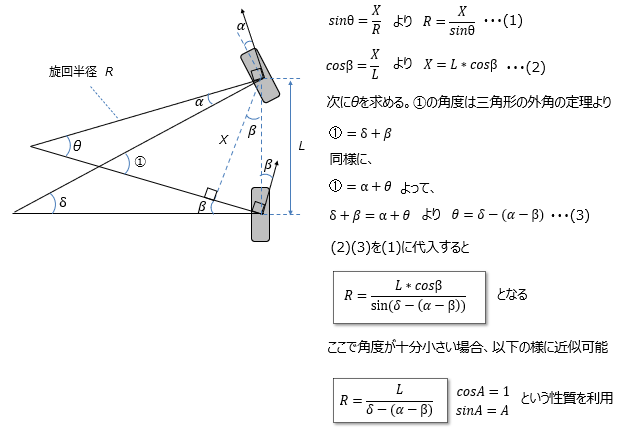
上記、角度が十分小さいときの三角関数の近似はこちらで説明。
サブチャンネルあります。⇒ 何かのお役に立てればと
エンジン, パワートレイン
・ 1サイクルの燃料量
・ BSCF
・ IMEP , BMEP
・ ハイブリッドシステム
車両運動
・ 車の加速度の求め方
・ トルクと出力の関係
・ 回転数と車速の関係
・ PWR, PMR
・ タイヤサイズ
・ ディスクブレーキ
・ 走行抵抗
・ コーナリングフォース
・ ピッチ, ロール, ヨー
・ 旋回半径
認証試験,法規制
・ WLTP , WLTC
・ 各国認証試験モード
・ CD, CSモード
・ 2サイクル, 5サイクル試験
・ OBD
・ 法規制, 規格
・ モデルイヤー
・ AC電費, DC電費
ISO
・ ISOとは
・ ISO9001
・ ISO15288
・ ISO27001
・ A-SPICE
部品, その他
・ バッテリーの容量
・ バッテリーの充電時間
・ バッテリー関連用語
・ オルタネータ
・ エアコンの原理
・ 普通充電, 急速充電
・ フェイルセーフ,フールプルーフ
・ ギアの種類, スプライン
・ ラジアル, スラスト
・ バックラッシュ
・ TL,BL,WL方向
・ デフ(差動装置), LSD
・ IQS, NCBS
生産技術
・ 溶接
・ 成形, 加工
|
|
|