
 エンジン, パワートレイン
・ 1サイクルの燃料量
・ BSCF
・ IMEP , BMEP
・ ハイブリッドシステム
車両運動
・ 車の加速度の求め方
・ トルクと出力の関係
・ 回転数と車速の関係
・ PWR, PMR
・ タイヤサイズ
・ ディスクブレーキ
・ 走行抵抗
・ コーナリングフォース
・ ピッチ, ロール, ヨー
・ 旋回半径
認証試験,法規制
・ WLTP , WLTC
・ 各国認証試験モード
・ CD, CSモード
・ 2サイクル, 5サイクル試験
・ OBD
・ 法規制, 規格
・ モデルイヤー
・ AC電費, DC電費
ISO
・ ISOとは
・ ISO9001
・ ISO15288
・ ISO27001
・ A-SPICE
部品, その他
・ バッテリーの容量
・ バッテリーの充電時間
・ バッテリー関連用語
・ オルタネータ
・ エアコンの原理
・ 普通充電, 急速充電
・ フェイルセーフ,フールプルーフ
・ ギアの種類, スプライン
・ ラジアル, スラスト
・ バックラッシュ
・ TL,BL,WL方向
・ デフ(差動装置), LSD
・ IQS, NCBS
生産技術
・ 溶接
・ 成形, 加工
|
前提知識、関連ページ
・自動車の加減速運動モデル
・ハイブリッド車の加減速運動モデル
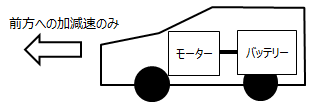
■電気自動車の加減速運動モデル
こちらで説明した自動車の加減速運動モデルをベースに、同様に前方に加減速する電気自動車のモデルを作ります。
トルクの発生源がモーター、モーターを動かすための電源がバッテリーとなります。
モデルの構成は以下のとおり。
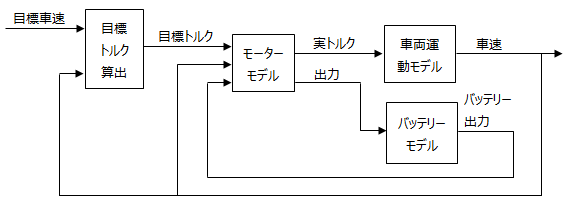
<目標モータートルク算出モデル、車両運動モデル>
こちらで説明したものと同じものを使用しています。車速を目標車速に追従するようにPID制御でトルクコントロールしており、車両運動モデルは与えられたトルクから車速を演算しています。
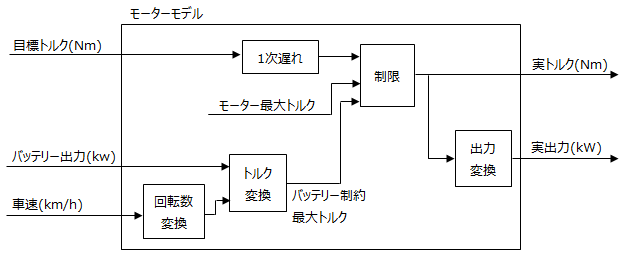
<モーターモデル>
目標トルクに従ってモーターの発生トルクを算出します。ここでは簡易的に、目標トルクに一次遅れの特性を持ってトルクが実現できるものとします。
ただし、モーターの性能とバッテリーが発生する最大出力によって、実現できるトルクが制限されます。
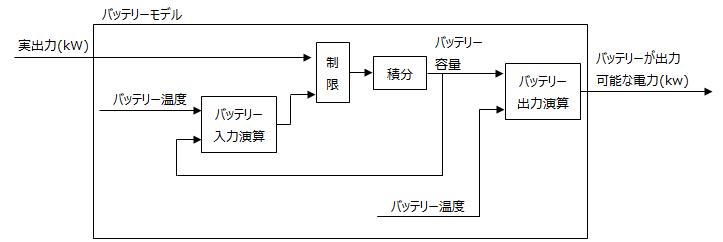
<バッテリーモデル>
バッテリー容量は電力の入力(充電)と出力(放電)の積算によって決まります。出力時は加速時にモーターが必要とする電力分だけバッテリーが放電しますが、
制約として現在のバッテリー容量とバッテリー温度から持ち出し可能な最大出力が決まります。
入力時は、車両の減速を行う際にモーターが発電した分がバッテリーに充電されますが、この時もバッテリー容量とバッテリー温度から充電が可能な量が決まります。
なお今回はバッテリー温度は固定値としております。
■Scilabによる設計、シミュレーション結果
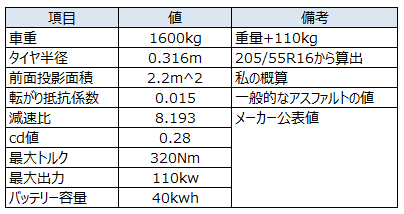
<パラメータ>
NISSAN リーフ(2020年調べ)の特性を入れてます。一部メーカー公表値ではなく私の概算があります。cd値や前面投影面積から走行抵抗を求める方法はこちら。
・Scilabによる設計結果⇒car2.zip
・シミュレーション結果は以下。車速はWLTCモードを入力しています。
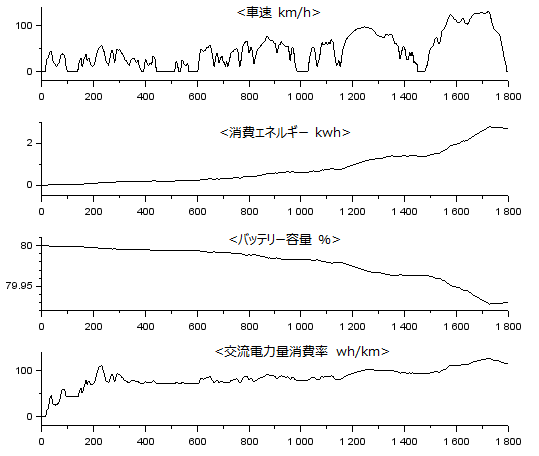
<交流電力消費率のメーカー公表値との比較>
リーフの交流電力消費率のメーカー公表値は155kw/kmに対し、シミュレーション結果は約1480秒時点(国内は1480秒までの測定のため)で93kw/kmと、シミュレーション結果の方が良い結果になりました。
この理由はいくつかあります。
① 車両消費電流分が考慮されていない。
② 減速回生のエネルギーが全て回収できている前提。実際にはモーターの発電効率等があるため、全ては回収できない。
③ 走行抵抗が概算値である。その他の機械的なロスが考慮されていない。
サブチャンネルあります。⇒ 何かのお役に立てればと
エンジン, パワートレイン
・ 1サイクルの燃料量
・ BSCF
・ IMEP , BMEP
・ ハイブリッドシステム
車両運動
・ 車の加速度の求め方
・ トルクと出力の関係
・ 回転数と車速の関係
・ PWR, PMR
・ タイヤサイズ
・ ディスクブレーキ
・ 走行抵抗
・ コーナリングフォース
・ ピッチ, ロール, ヨー
・ 旋回半径
認証試験,法規制
・ WLTP , WLTC
・ 各国認証試験モード
・ CD, CSモード
・ 2サイクル, 5サイクル試験
・ OBD
・ 法規制, 規格
・ モデルイヤー
・ AC電費, DC電費
ISO
・ ISOとは
・ ISO9001
・ ISO15288
・ ISO27001
・ A-SPICE
部品, その他
・ バッテリーの容量
・ バッテリーの充電時間
・ バッテリー関連用語
・ オルタネータ
・ エアコンの原理
・ 普通充電, 急速充電
・ フェイルセーフ,フールプルーフ
・ ギアの種類, スプライン
・ ラジアル, スラスト
・ バックラッシュ
・ TL,BL,WL方向
・ デフ(差動装置), LSD
・ IQS, NCBS
生産技術
・ 溶接
・ 成形, 加工
|
|
|