
 エンジン, パワートレイン
・ 1サイクルの燃料量
・ BSCF
・ IMEP , BMEP
・ ハイブリッドシステム
車両運動
・ 車の加速度の求め方
・ トルクと出力の関係
・ 回転数と車速の関係
・ PWR, PMR
・ タイヤサイズ
・ ディスクブレーキ
・ 走行抵抗
・ コーナリングフォース
・ ピッチ, ロール, ヨー
・ 旋回半径
認証試験,法規制
・ WLTP , WLTC
・ 各国認証試験モード
・ CD, CSモード
・ 2サイクル, 5サイクル試験
・ OBD
・ 法規制, 規格
・ モデルイヤー
・ AC電費, DC電費
ISO
・ ISOとは
・ ISO9001
・ ISO15288
・ ISO27001
・ A-SPICE
部品, その他
・ バッテリーの容量
・ バッテリーの充電時間
・ バッテリー関連用語
・ オルタネータ
・ エアコンの原理
・ 普通充電, 急速充電
・ フェイルセーフ,フールプルーフ
・ ギアの種類, スプライン
・ ラジアル, スラスト
・ バックラッシュ
・ TL,BL,WL方向
・ デフ(差動装置), LSD
・ IQS, NCBS
生産技術
・ 溶接
・ 成形, 加工
|
前提知識
・車の加速度の求め方
・PID制御
・Scilab
・WLTCモード
■車両加減速運動モデル
以下の様に前方に加減速する車のモデルを作ります。
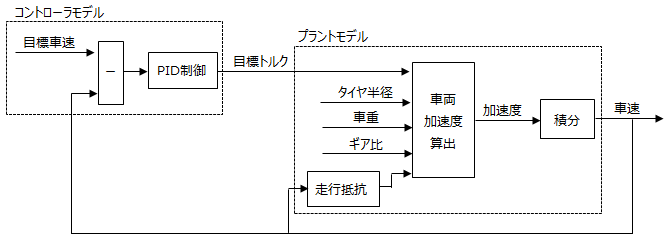
<プラントモデル>
前方に加減速する車両運動モデル。トルクを与えたら車両に加速度と速度が発生します。加速度を求める方法はこちらを参照。
この時の発生トルク源はエンジンもしくはモーターなど種類は問いません。
<コントローラモデル>
目標車速に追従するようPID制御によりトルクをコントロールするモデルです。
■Scilabによる設計、シミュレーション結果
Scilabによる設計結果⇒car.zip
<車両パラメータ>適当な値を設定します。
車重:1600kg
ギア比:8
タイヤ半径:0.3m
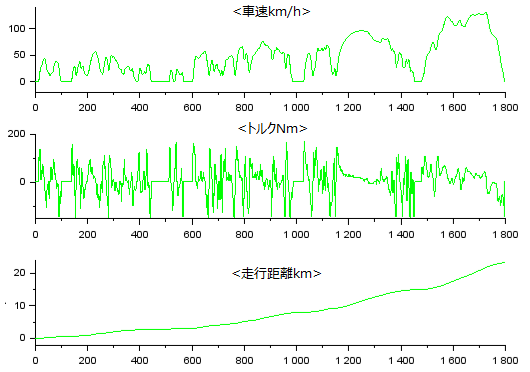
<シミュレーション結果>
以下のとおり。車速はWLTCモードを入力しています。WLTCモードの走行距離は約23kmです。
サブチャンネルあります。⇒ 何かのお役に立てればと
エンジン, パワートレイン
・ 1サイクルの燃料量
・ BSCF
・ IMEP , BMEP
・ ハイブリッドシステム
車両運動
・ 車の加速度の求め方
・ トルクと出力の関係
・ 回転数と車速の関係
・ PWR, PMR
・ タイヤサイズ
・ ディスクブレーキ
・ 走行抵抗
・ コーナリングフォース
・ ピッチ, ロール, ヨー
・ 旋回半径
認証試験,法規制
・ WLTP , WLTC
・ 各国認証試験モード
・ CD, CSモード
・ 2サイクル, 5サイクル試験
・ OBD
・ 法規制, 規格
・ モデルイヤー
・ AC電費, DC電費
ISO
・ ISOとは
・ ISO9001
・ ISO15288
・ ISO27001
・ A-SPICE
部品, その他
・ バッテリーの容量
・ バッテリーの充電時間
・ バッテリー関連用語
・ オルタネータ
・ エアコンの原理
・ 普通充電, 急速充電
・ フェイルセーフ,フールプルーフ
・ ギアの種類, スプライン
・ ラジアル, スラスト
・ バックラッシュ
・ TL,BL,WL方向
・ デフ(差動装置), LSD
・ IQS, NCBS
生産技術
・ 溶接
・ 成形, 加工
|
|
|