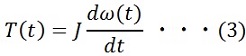
モーターと回転運動体の微分方程式 |
|||||||
・ニュートンの法則,万有引力 ・遠心力 ・等加速度直線運動 ・力,トルク,仕事,出力 ・慣性モーメント ・エネルギーと仕事 ・加速度,角加速度 ・摩擦力 ・斜面の物体に働く力 ・加速度センサの原理,勾配 ・ラグランジュの運動方程式 ・光の性質 ・相対性理論 ・質量とエネルギーの等価性 ・量子力学の歴史 ・二重スリット実験 ・量子重ね合わせ, 量子もつれ ・量子消しゴム ・バネマスダンパ系 ・回転運動系 ・回転運動系(低剛性負荷) ・加速度運動系 ・倒立振子 |
・In Japanese
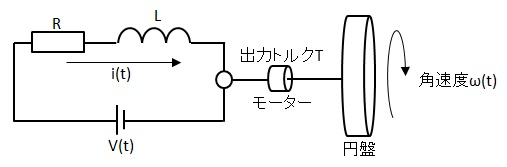
■モーターと回転運動体の微分方程式
こちらでDCモーターの原理について説明しました。次にモーターに円盤を取り付けてその動作を確認します。
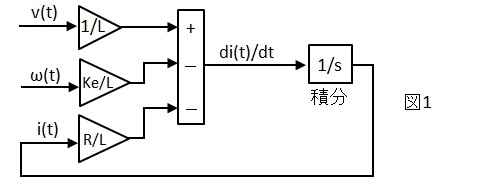
電圧と電流の関係式は以下のとおり。(ω:モーターの回転速度, Ke:逆起電力定数) ■モーターと回転運動体のモデルをScilabで設計
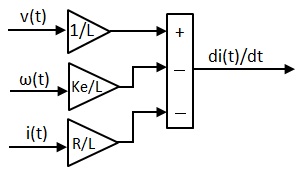
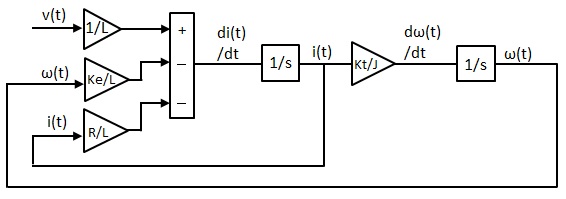
電圧に対する円盤の回転速度の関係をScilabで再現します。それにはちょっとしたコツというか慣れが必要なのですが、まずは(1)式を以下のとおり変形します。
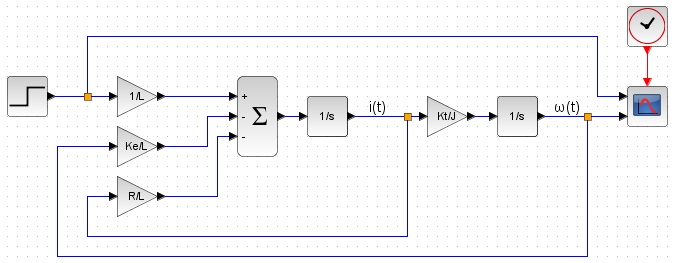
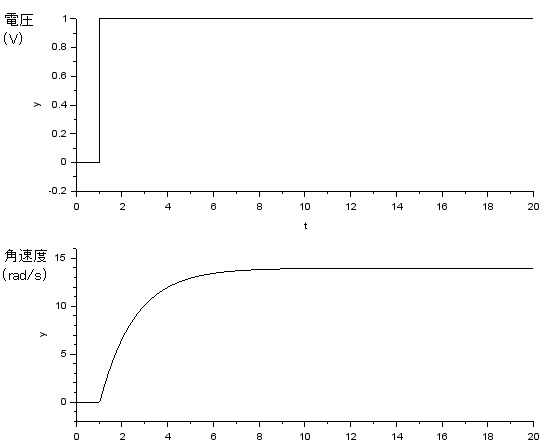
Scilabの使い方はこちらを参照。 ■モーターと回転運動体の動作のシミュレーション結果
上記モデルをシミュレーションで確認します。パラメータは以下のとおり。 ■モーターの角速度から電圧を求める場合
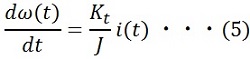
今回は特に使いませんが角速度から電圧を求める場合、(5)式を(1)式に代入します。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||