Differential equations for motors and rotating bodies |
|||||||
・Force,torque,work,power ・Centrifugal Force ・Acceleration ・Mass-spring-damper ・Moment of inertia ・Inverted pendulum ・Differential eq. for motors ・Slope angle ・Frictional force |
・In Japanese
■Differential equations for motors and rotating bodies
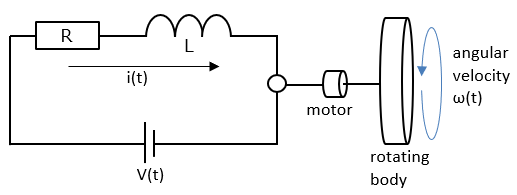
Explain the principle of the DC motor here. Calculate differential equations of motors and rotating bodies and simulate their behavior.
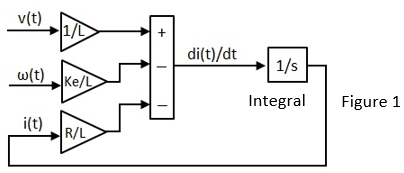
The relational expression between voltage and current is as follows. (ω: Motor rotation speed, Ke: Back electromotive force constant) ■Design a model of a motor and a rotating body in Scilab
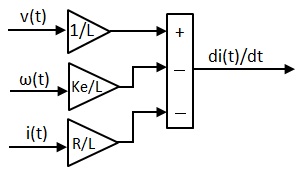
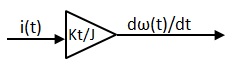
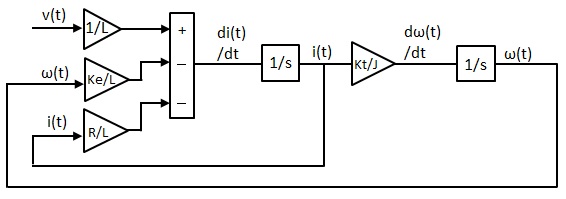
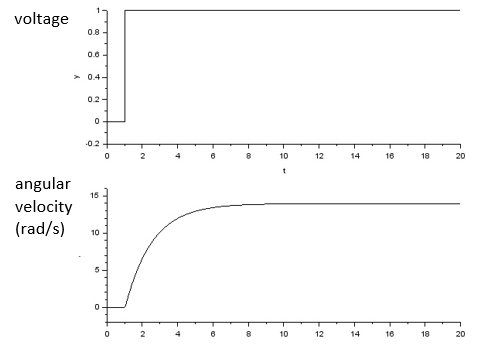
Express the relationship between the voltage and the rotation speed of the disc in Scilab. (1) is transformed as follows. ■Simulation results of motion of motor and rotating body
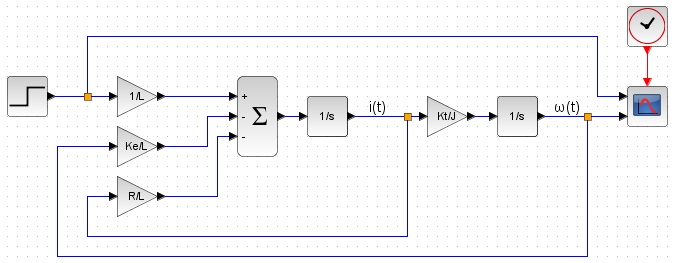
Simulate the above model. The parameters are as follows. ■When obtaining the voltage from the angular velocity of the motor
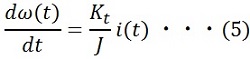
We will not use it this time, but when calculating the voltage from the angular velocity, substitute the formula (5) into the formula (1).
|
|
|||||