バネマスダンパ系 |
|||||||
・ニュートンの法則,万有引力 ・遠心力 ・等加速度直線運動 ・力,トルク,仕事,出力 ・慣性モーメント ・エネルギーと仕事 ・加速度,角加速度 ・摩擦力 ・斜面の物体に働く力 ・加速度センサの原理,勾配 ・ラグランジュの運動方程式 ・光の性質 ・相対性理論 ・質量とエネルギーの等価性 ・量子力学の歴史 ・二重スリット実験 ・量子重ね合わせ, 量子もつれ ・量子消しゴム ・バネマスダンパ系 ・回転運動系 ・回転運動系(低剛性負荷) ・加速度運動系 ・倒立振子 |
・In English
■バネマスダンパ系の微分方程式
バネマスダンパ系の運動方程式/微分方程式の導出方法の説明、およびバネマスダンパのモデルの構築、シミュレーションによる動作確認を行います。
下記図の様なバネマスダンパ系に、力F(t)を与えた時の変位量x(t)を求めます。
それぞれにかかる力は以下のとおり。 <バネの運動方程式>
フックの法則により、バネにかかる力はバネ定数kとバネの変位量x(t)に比例するため、以下となります。 <ダンパの運動方程式>
ダンパという物は、例えば車のサスペンションについている様な部品で、ショックアブソーバー(振動減衰装置)とも呼ばれます。
イメージとしては円筒状の部品(シリンダ)の中に油が入っているピストンの様なもので、ピストンを思い切り押してもすぐには進まず、
これがショック吸収の役割を果たしています。イメージ図は下記のとおり。 <マスの運動方程式>
マスは単なる質量のある物体で、質量mの物体にかかる力Fmと加速度aの関係はニュートンの運動方程式により以下となります。 <バネマスダンパ系の微分方程式の最終系>
(2)(3)(4)式を(1)に代入します。 ■バネマスダンパ系のモデルをScilabで設計
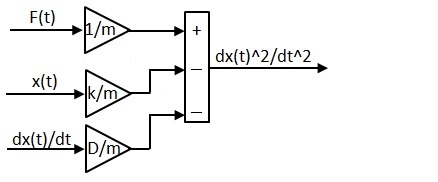
(5)式をScilabで設計するのですが少しコツがいります。力を与えた時の変位量x(t)を最終的に求めたいのですが、
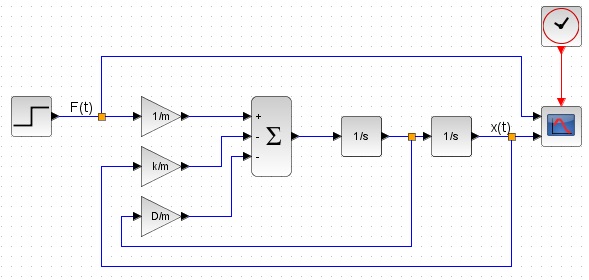
先ずは以下の様に変形します。 ■バネマスダンパ系の動作のシミュレーション結果
シミュレーション結果と各パラメータは以下となります。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||