
|
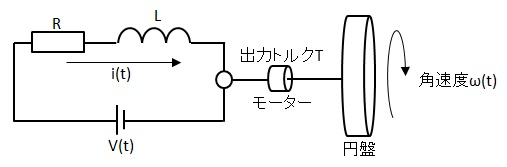
こちらでモーターと円盤のモデルについて説明しましたが、入力V(t)に対し出力を回転速度w(t)としたときの
伝達関数を求めてみます。


■ラプラス変換
上記式をラプラス変換します。(1)式より

また(2)式より

■ブロック図で表現
上記(3)(4)式をブロック図で表現すると以下の様になります。

これを一つの伝達関数で示すと以下となります。伝達関数の合成の方法についてはこちらを参照。


これは分母がsの2乗の形になっているため、2次遅れ系の伝達関数と呼びます。
■系の特性を考える
こちらで説明した様に、(5)式の特性方程式(分母多項式)の解(極)を求めれば、この伝達関数の特性を知る事が出来ます。
先ずは(5)式を下記の様に一般化して考えます。

上式の特性方程式は、

2次方程式の解の公式より、

この式の極は、平方根の中にあるζの値によって実数だけになるか虚数を含むかで、特性は大きく変わります。
何故ならこちらで説明した様に、実数は減衰成分、
虚数は振動成分を表すからです。
では実際にシミュレーションで動作確認をしてみます。Scilabで以下の様に設計します。ここでωは2としました。


結果を以下にまとめます。ζの値(2次方程式の解)に応じ特性が変わっているのが解ります。

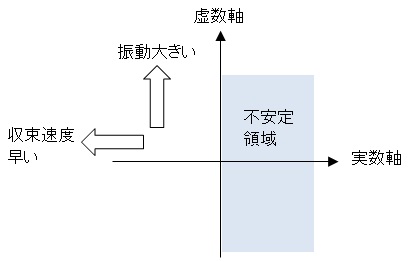
■極を複素数平面上に表現
極が複素平面上のどこに配置されているかでその特性が解ります。

実数軸の正側は不安定、負側は収束となり、虚数軸の成分が入っていると振動するということになります。(先ほど説明したとおり)
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|