状態方程式の伝達関数の求め方 |
|||||||||||||||
・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題
|
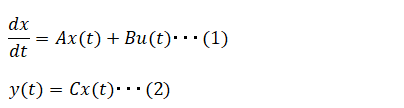
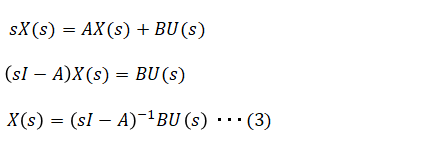
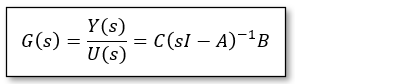
・In English 状態方程式を伝達関数で表現する方法を説明します。状態方程式を伝達関数で表現することの利点はシステムの安定性を調べる事が可能になる等があります。 ■1次システムの状態方程式の伝達関数
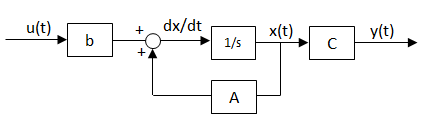
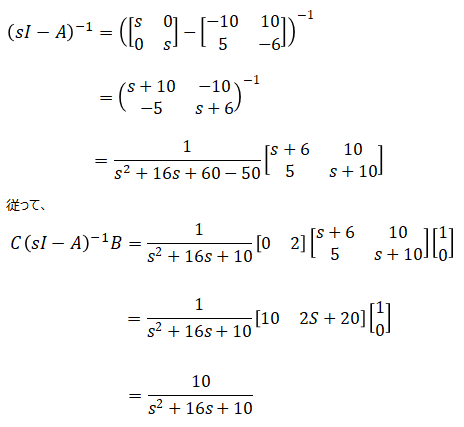
以下の様な最も基本的な形である1次システムの場合を説明します。
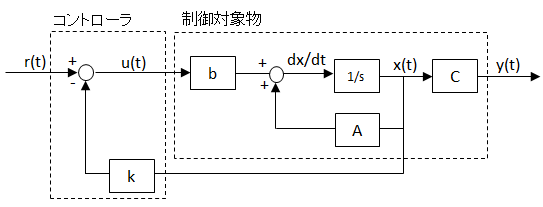
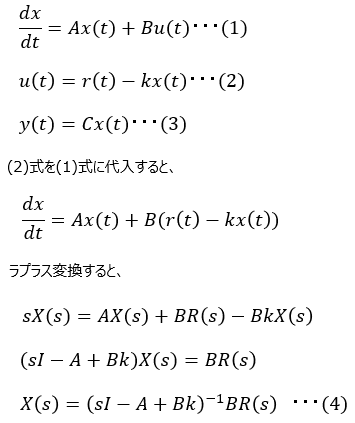
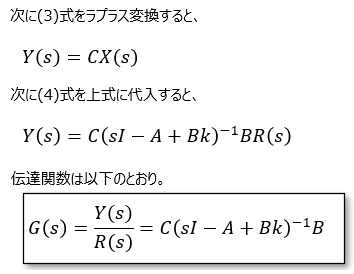
■状態フィードバック系の状態方程式の伝達関数
以下状態フィードバック制御系のシステムを伝達関数に変換します。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||||||||||