|
・In English
前提知識
・PID制御
・モーターの微分方程式
・不完全微分
・scilabとは
・scilabのスーパーブロック化
■外乱オブザーバとは
外乱オブザーバとは、制御対象物に加わる外乱を推定して制御対象物への入力にフィードバックする事で、外乱発生時の応答を素早くする制御手法の事です。
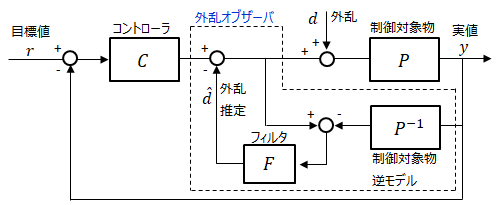
<基本形①>
ブロック図は以下のとおり。制御対象物Pの出力値をPの逆モデルに入力させたら、Pにどんな値が入力されていたか解ります。
外乱が無ければそれはコントローラの出力値と一致する筈ですが、差分がある時それは外乱としてPに入力された値となりますので、
その分をコントローラの出力から差し引けば、外乱成分が除去できます。なお逆モデルには微分が入る事が多くノイズの影響を受けやすいので
不完全微分にする為にフィルタを用います。
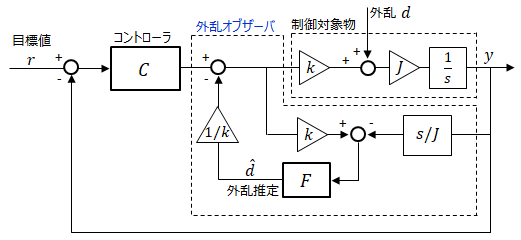
<基本形②>
外乱が制御対象物の中に入っている場合は以下の様にします。考え方は基本形①と同じです。
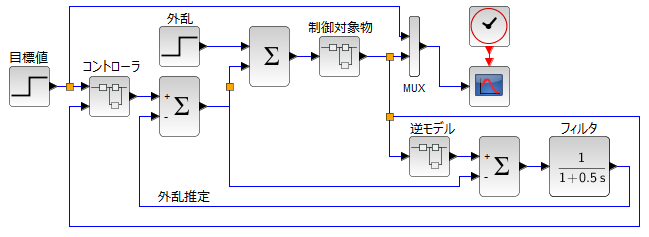
■外乱オブザーバの具体例
コントローラはPID制御、制御対象物をモーターとしたときの、外乱オブザーバの動作を確認します。スーパーブロック化されたそれぞれの中身はこちら。
Scilabプログラムファイルは以下。
OBS.zip
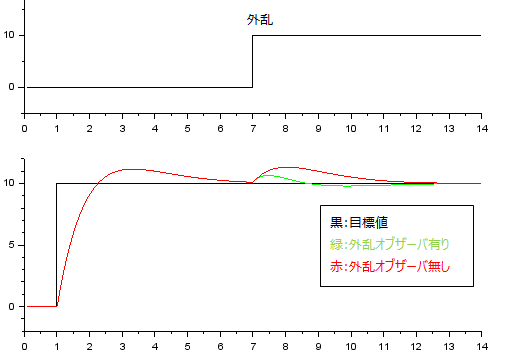
■外乱オブザーバのシミュレーション結果
結果は以下のとおり。オブザーバが有った方が外乱が発生しても素早く目標値に収束するのが解ります。
■外乱オブザーバのメリット/デメリット
<メリット>
・ 外乱に対する応答性を高める事が可能。
・ 既存のフィードバックコントローラを壊すことなく、オプション的に付け外しが可能。
<デメリット>
・ 制御対象物を(逆)モデル化する必要がある。
→ 制御対象物の特性を知らなくて制御できるPID制御の利点が損なってしまう。
・ 微分を使う事になるので、不安定になる可能性がある。
→ フィルタを付けて不完全微分の形にすることで、安定性を向上させる。
サブチャンネルあります。⇒ 何かのお役に立てればと
|