現代制御とは 古典制御との違い |
|||||||||||||||
・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題
|
・In English
古典制御の一つであるPID制御についてこちらで説明していますが、古典制御も現代制御も制御対象物を狙いの動作にするという目的は変わりません。
その制御対象物を制御する手法が異なるのですが、具体的にどう異なるのか説明します。 ■古典制御の特徴
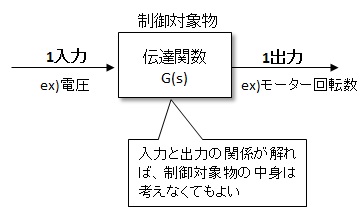
まず古典制御について振り返ってみます。古典制御は先ず制御対象物の微分方程式を解き、それを伝達関数で表現します。
伝達関数とは1つの入力に対して1つの出力を持つ関数です。その出力を狙いの出力にするために、より最適な入力値を与えていくのが
古典制御であり、いかにしてより最適な入力値を見出すかを追求するのが古典制御理論です。 <古典制御のメリットとデメリット>
古典制御は、制御対象物の中身が解らなくても(微分方程式を解かなくても)入力と出力の関係が解れば良いので、制御の構築及びチューニングが
容易であるというメリットがあります。しかし制御構築とチューニングが容易である反面、理論的に最適であるという物が作れないというデメリットがあります。
チューニングにある程度の経験が必要になってきます。
■現代制御の特徴
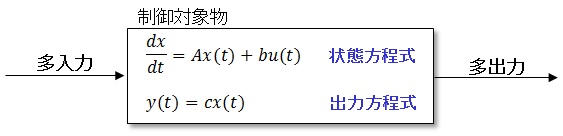
制御対象物の入力と出力の関係さえ解れば良い古典制御に対して、現代制御は制御対象物の内部状態を重要視します。
微分方程式を解くのは古典制御も同じですが、そのあと状態方程式で表現します。状態方程式は内部状態をきちんと表現し入力と出力の関係を定義します。
そして入力と出力は1つだけではなく、多入力、多出力に対応可能です。 <現代制御のメリットとデメリット>
現代制御は、制御対象物の内部状態を正確に表現することで、数学的に正しいフィードバックゲインの設定が可能となります。
また、状態変数を使って1階の微分方程式で表記できるので、難解な微分方程式でも扱う事が出来るというのが大きなメリットとなります。
逆にデメリットとしては、内部状態を正しく表現する必要がある(微分方程式を立てるスキルが必要)のと、フィードバックゲインの影響度が直感的に理解できないというのがデメリットです。
少しゲインを直したいと思っても難しいのです。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||||||||||