
|
前提知識
・状態方程式とは
・特性方程式
・状態方程式の伝達関数
■安定性
こちらで説明したように、古典制御においてはシステムの安定性は伝達関数の特性方程式から判断することが出来ました。
現代制御にも同じような考え方を用いることが出来ます。
すなわち、状態方程式を伝達関数で表現できたら、特性方程式の根を求めれば安定性か否かが判断できます。
以下システムを伝達関数で表現します。状態方程式の伝達関数での表現の仕方はこちらで説明。
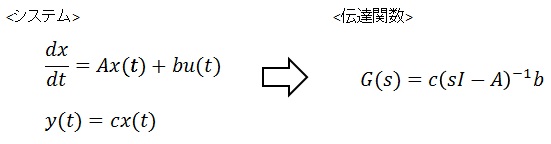
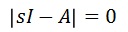
上記伝達関数の特性方程式は以下となり、すべての根が負であれば安定しているという事になります。
■特性方程式
■具体例
以下システムの安定性を判別します。

特性方程式は、
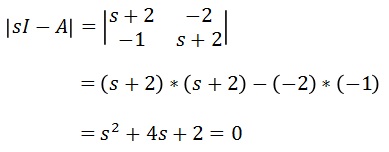
より、
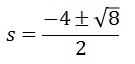
sが全て負ではない為、このシステムは不安定と言うことが解ります。
なお、この特性方程式の根はAの固有値といいます。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|