オブザーバによる状態推定 |
|||||||||||||||
・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題 ・サーボ問題 ・サーボ問題(内部モデル) ・レギュレータ問題
|
・In English
■状態フィードバックの問題点
こちらで状態フィードバック制御について説明しましたが、ある問題があります。それは状態変数を必ずしも計測できないという事です。
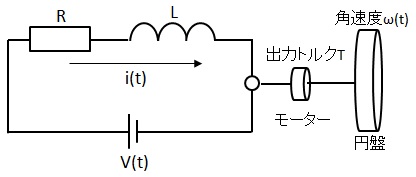
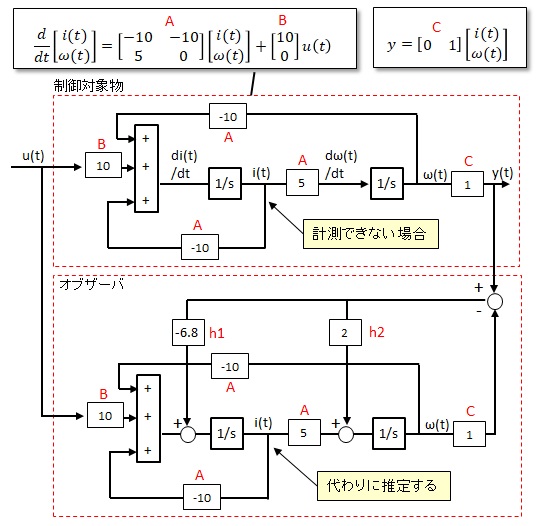
例えば以下システムにおいて、モーターの回転速度を狙いの位置に制御したい場合、実の回転速度と電流値の情報が必要になります。しかし様々な事情により
実際に電流値を測ることが出来ない場合、役立つのがオブザーバという考え方です。
■オブザーバによる状態推定とは
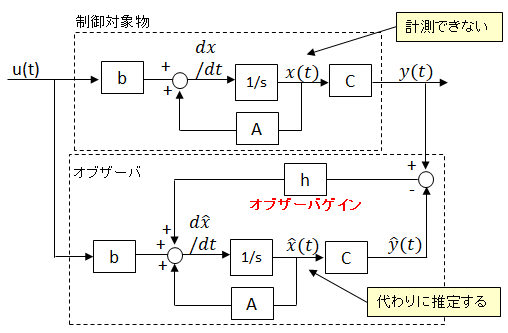
オブザーバの考え方を簡単にいうと、計測できない情報を、他の計測できる情報からモデルで(計算機上で)推定するというものです。オブザーバの形は以下の様になります。
なおオブザーバは状態を推定する機能なので、これだけでは制御対象物をフィードバックできません。オブザーバを用いて状態フィードバックする方法はこちらで説明。 ■オブザーバゲインの設定
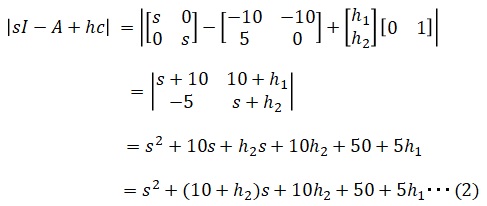
考え方は、こちらで説明した様な状態フィードバックゲインの設定に用いた極配置法を使用します。
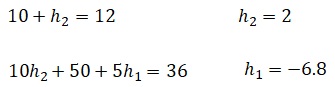
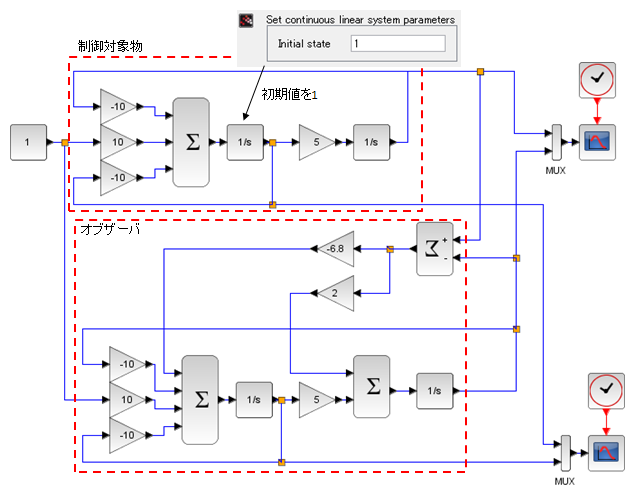
(6)より、以下特性方程式の根が負となるようなhを求めれば良いことになります。 ■オブザーバのScilabでの設計
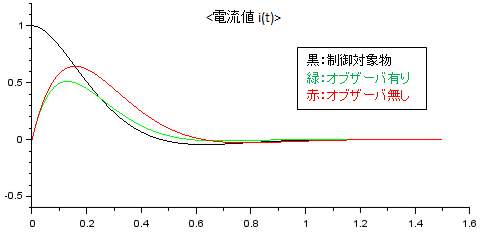
上記システムをブロック図で表現すると以下です。 ■オブザーバによる状態推定のシミュレーション結果
以下のとおり。オブザーバ有りの方が早く制御対象物の値に一致するのが解ります。 ■オブザーバのメリット, 逆モデルより精度が良い
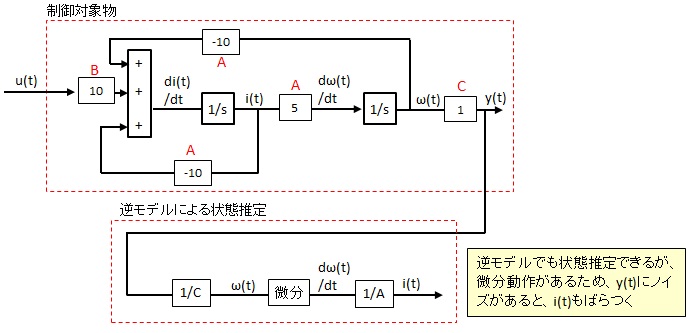
オブザーバとは計測できない状態量を推定するものですが、状態量を推定する方法はもう一つ考えられます。
それは出力値から以下の様に逆算して求める方法です。この手法でも一見良いと思いますが、出力値は実際にはノイズが含まれる場合が多く、
その状態で微分を行うと正しい状態量を求めることが難しいことが知られています。オブザーバを用いれば、出力値にノイズがあっても精度よく
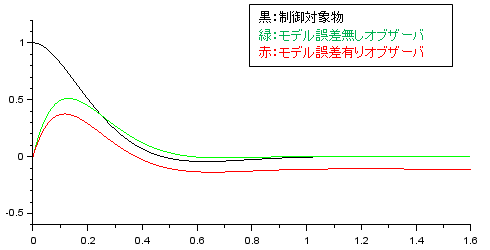
状態量を推定することが出来ます。 ■オブザーバの欠点, モデル化誤差を補正する訳ではない
オブザーバはモデル化誤差を補正する訳ではありませんので、モデルに誤差があると正しく状態量を推定することが出来ません。
試しに上記オブザーバのBの値を10⇒8に変更した時のシミュレーション結果を示します。誤差分だけ制御対象物と一致していないことが解ります。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||||||||||