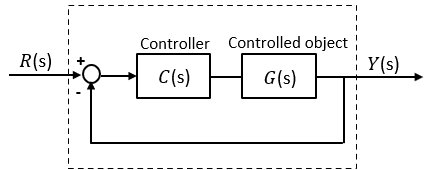
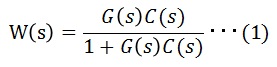
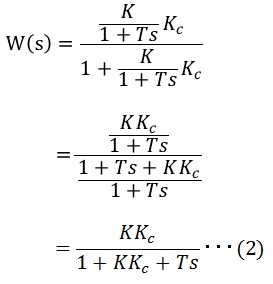
The closed-loop transfer function of this system is as follows. Click here to learn how to synthesize transfer functions.
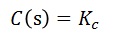
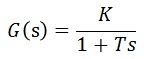
Here,
Therefore, equation (1) is as follows.
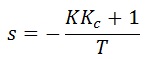
■Characteristic equation
The characteristic equation for equation (2) is as follows.
Here,
■Expression on the complex plane
The calculated s is expressed on the complex plane as follows. If K and T are positive, the object has the property of stabilizing.
The convergence can be improved by changing the value of Kc. This is the role of the F/B gain Kc. However, in reality,
Kc cannot be made as large as one wishes, and there are limitations such as hardware. This will be explained separately.
Also, as a property of s, even if the F/B gain Kc is changed, the value will only be a real number, so the target will not vibrate
■Final value theorem
Another important characteristic of P control and first-order lag systems is that they do not always converge to the target value and leave a steady-state deviation.
The reason for this will be explained.
The final value theorem states that the following holds for the value of a stable time function F(t) after sufficient time has passed.
The final value Y(s) when R(s) is input to the P control + first-order delay system W(s) described above is found. R(s) is assumed to be a fixed value r,
and the Laplace transform of this is as follows.
From the final value theorem,
Substituting equations (2) and (3) into the above equation,
If s=0 here, it becomes the following.
The above formula means that the following part does not become 1, so the output y (∞) does not match the input r (although it can approach 1 if Kc is made infinitely large).
This is the reason why the target does not converge and steady-state deviation remains, as mentioned earlier.
■Gain setting value
In light of the above, the larger the gain of P control for a first-order lag system (as long as the hardware constraints allow), the better.
However, since steady-state deviation always remains, P control cannot be said to be the optimal method for a first-order lag system in the first place. We will explain
PI control, which is one of the methods for eliminating steady-state error.