
|
PID制御ゲインはステップ応答法や限界感度法の様に実験的に求めることが出来ますが、
ここではゲイン設定方法をもっと理論的に考えてみたいと思います。
こちらで説明した様に、制御対象物が安定か否かは、伝達関数の特性方程式の解(極)から判断することが出来ます。
<極の位置と対象物の振る舞いの関係>
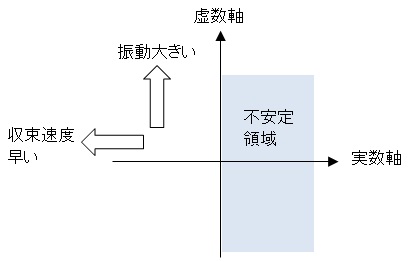
対象物を制御するということは、そのままでは不安定だったり収束速度が遅い対象物を、出来るだけ早く安定的な状態に持っていく事です。
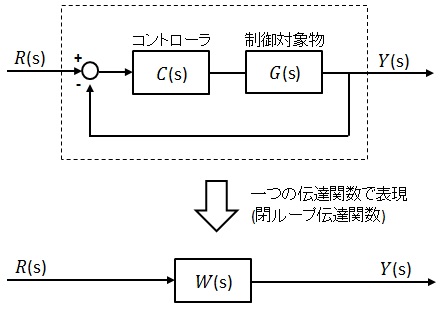
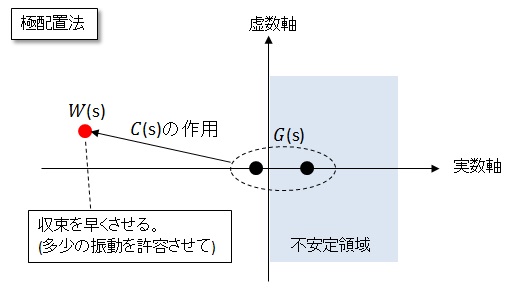
具体的には、対象物と制御(コントローラ)を一つの伝達関数と考え、その伝達関数の極を狙いの位置に持ってくれば良いのです。
この様な考え方を極配置法といいます。
それでは次に具体的な事例で説明します。こちらをクリック。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|