
|
こちらでボード線図による安定判別法について説明しました。
次に具体的なフィードバックゲインの設定方法について説明します。考え方としては、
フィードバックゲインを変えることで、系をより安定させることが出来たら良く、
ゲイン余裕は10~20dB、位相余裕は40~60°に収めるのを目安とします。
以下1次遅れ系の制御対象物を、P制御する場合を考えます。
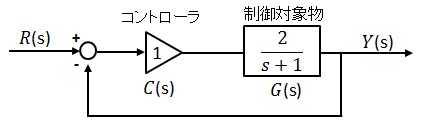
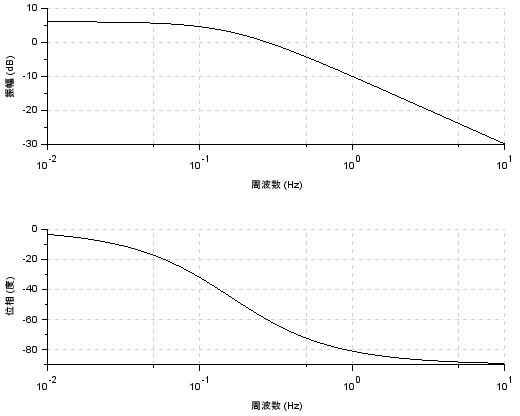
上記の一巡伝達関数をボード線図で描くと以下となります。位相は最小で-90°に収束するため、
ゲイン余裕、位相余裕ともに十分余裕のある状態で、安定していることが解ります。
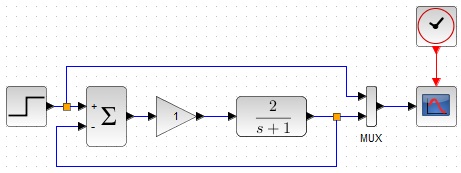
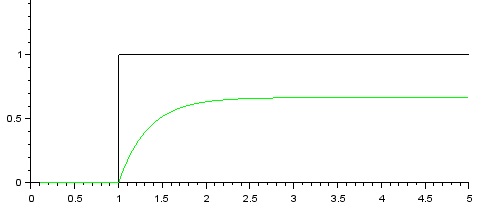
動作としては下記となり、安定はしているのですが動作が遅く、定常偏差も大きく残っています。
■ゲイン設定
応答性を高めるためにコントローラのゲインを変更します。ただし、ゲイン変更で不安定なものにしてはいけません。
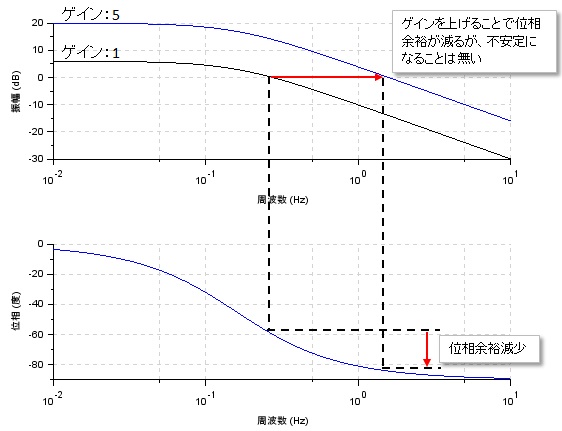
ここではゲインを5倍にしてみます。ボード線図は以下のとおり。
ゲインを上げることで位相余裕は減りますが、安定の範囲内にあり、不安定になることは有りません。
この様に1次遅れ系+P制御は、ゲインをいくら上げても不安定になりません。ただし、実物に対して制御する場合は、
ゲインの設定に限界がありますので注意が必要です。
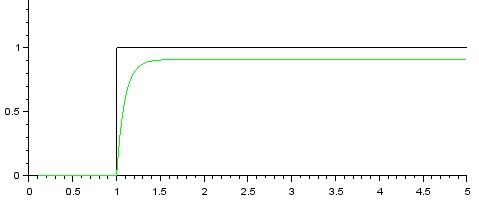
シミュレーション結果は以下のとおり、応答性が高まっているのが解ります。ただし定常偏差は減らす事は出来ますが、
完全になくすことは出来ません(この事についてはこちらで説明しております)。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|