
|
前提知識
・内部モデル制御(IMC)について
・オブザーバによる状態フィードバック
こちらでIMCについて説明しましたが、現代制御のオブザーバによる状態フィードバックと形が似ているので、その違いについて説明します。
オブザーバの説明はこちら。
先ずそれぞれのフィードバックの形を以下に示します。
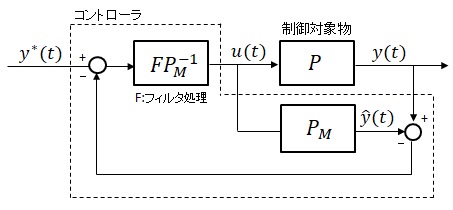
■IMC
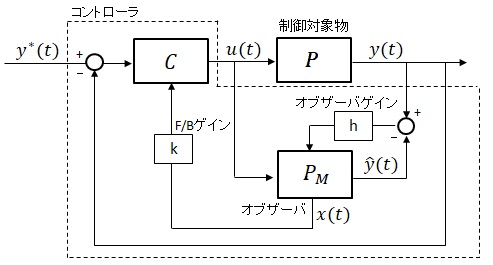
■オブザーバによる状態フィードバック
■違い
どちらも制御対象物をモデル化しコントローラに組み込んで、実制御対象物と比較している点は同じですが、
IMCは比較結果を直接入力値にフィードバックさせているのに対し、オブザーバは比較結果をオブザーバの推定精度を
高めるために使用しており、オブザーバゲインを通してオブザーバーに返しております。フィードバックゲインはまた別にあります。
またIMCの方が制御構築が比較的容易であるのに対し、オブザーバによる状態フィードバックは制御構築が難解です。
しかし後者は、多入力/他出力での制御が可能であるため、複雑な制御対象でも制御が可能です。簡単な制御対象物の場合はIMCで十分制御可能です。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|