比例微分先行型PID制御(I-PD制御) |
|||||||||||||
|
・In English
■比例微分先行型PID制御とは
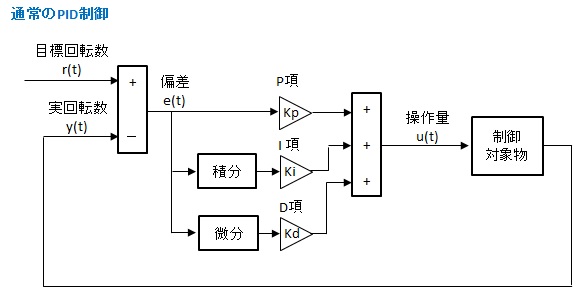
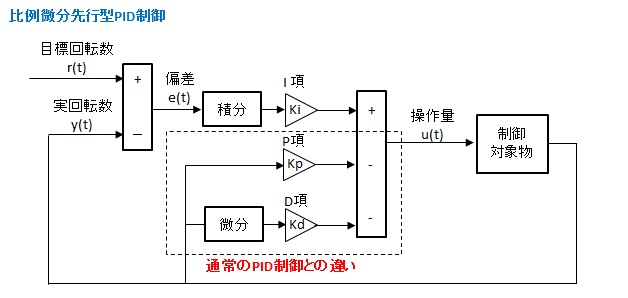
PID制御において、微分項や比例項によって目標値が急変した時に操作量が急変することをキックといいますが、
このキックを抑えるための手法の一つである比例微分先行型PID制御(I-PD制御)について説明します。なお類似の制御に微分先行型PID制御というのもあります。
■比例微分先行型PID制御の設計
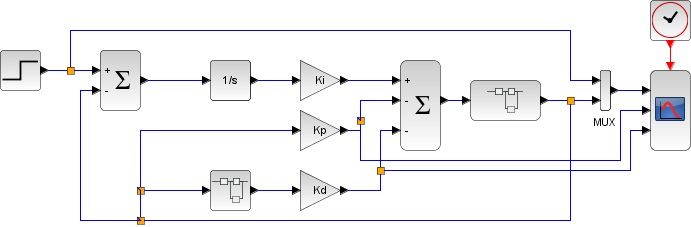
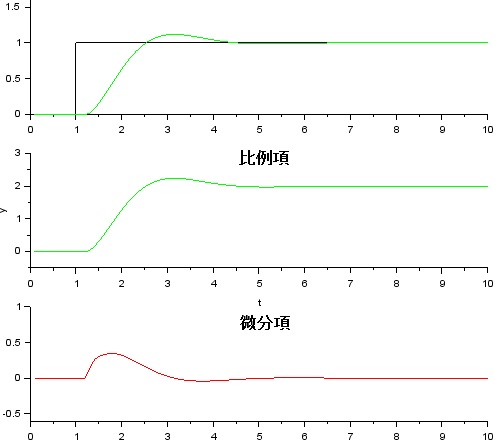
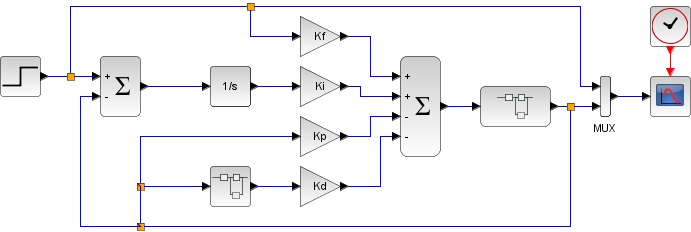
Scilabで設計すると以下となります。制御対象物及び微分器の中身はこちら。 <比例微分先行型PID制御のデメリット>
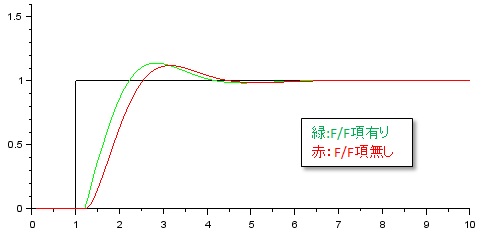
比例微分先行型PID制御によって、操作量の急変(キック)が無い状態となりましたが、応答性が遅くなるのがデメリットとなります。
応答性改善のため以下の手法をとります。 ■フィードフォワード+比例微分先行型PID制御
応答性改善のために、以下の様に目標値に対してゲインをかけて補正します。これがフィードフォワード(F/F)の役割となります。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||||||||