
|
前提知識
・IMCとは
こちらで内部モデル制御について説明しましたが、この制御は制御対象物の微分方程式とその逆関数を求める必要があります。
しかし、制御対象物の微分方程式を立てる事ができないのは実際の現場ではよくある事で、そのためなかなかこの制御を使う事ができないと思うかもしれません。
しかしこの制御はモデル化誤差を許容しているため、厳密に微分方程式を立てなくても良いです。ここではそういったことを踏まえ内部モデル制御を使う上でのテクニックを説明します。
■制御対象物のモデル(順モデル)と逆モデルの関係
内部モデル制御には制御対象物のモデル(順モデル)化と制御対象物の逆モデル化が必要ですが、順モデルは作れるが逆モデルを作るのが難しいという事も実はあります。
順モデルと逆モデルの関係を一致させておかなければ制御として成り立たないのが基本ですが、一致させなくても良い場合もあるので事例をもとに説明します。
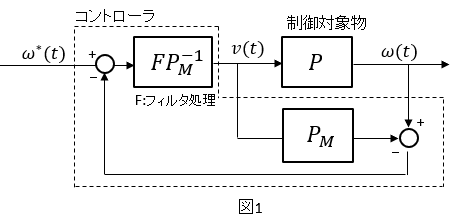
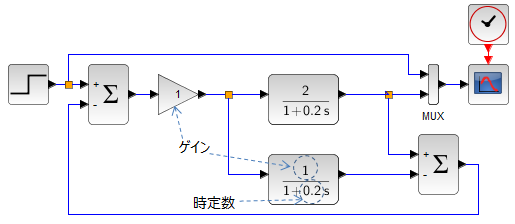
まずおさらいですが、内部モデル制御の一般系は以下となります。
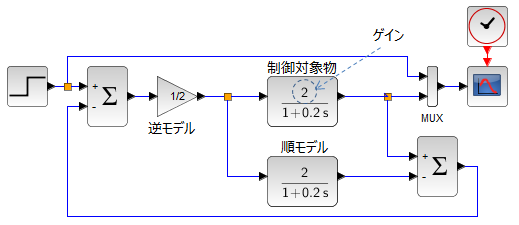
ここで以下のような一次遅れ系の制御対象物に対する内部モデル制御の構築例を示します。逆モデルは本来一次進みが必要ですが、
ここではゲインのみを逆モデル化しており、順モデルと逆モデルが一致していない状態となります。
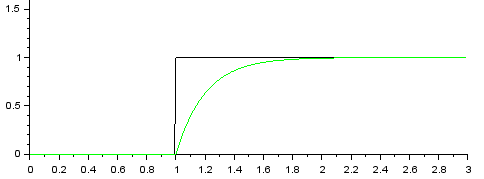
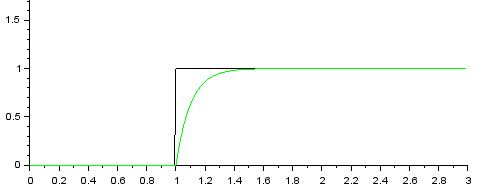
シミュレーション結果は以下のとおり、目標と出力結果が一致しております。
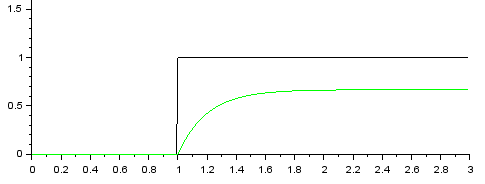
次に逆モデルのゲインを順モデルと違う値に設定します。逆モデルのゲインは1/3にします。結果を見てわかる様に、目標と出力結果が一致しないことが解ります。
以上より順モデルと逆モデルの一致性は、ゲインは必ず逆モデル化する必要があります。ただし、遅れ系を逆モデル化(1次進み化)する必要はありません。
■制御対象物に対するモデル化誤差の許容範囲
内部モデル制御はモデル化誤差を許容することは述べましたが、どこまでの誤差なら良いのでしょうか。まずはゲインを1にした時の制御性をみます。
シミュレーション結果は以下のとおり。ゲインが異なっても目標値に収束することが解ります。
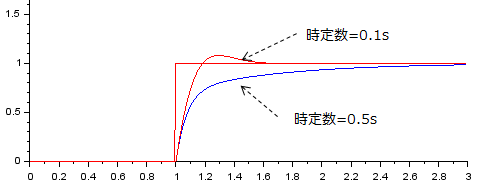
次に時定数を0.1s、0.5sと変えた時の収束性は以下のとおり。収束性だけを変えて目標値に一致させることができます。
■まとめ
内部モデル制御を扱う上でのテクニックとして、
① 制御対象物を完ぺきにモデル化できなくても良い。モデル化できた方がより望ましい。
② 順モデルはできるが逆モデル化が難しい場合は、逆モデル化可能な簡易順モデルでもよい。
③ 順モデルと逆モデルは、ゲインは一致させる必要があるが時定数は一致させなくてもよい。
上記の様にかなり緩い制約で、しかもPIDより簡単なコントローラでにフィードバックさせることができます。PIDとの比較詳細はこちらで説明しております。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|