Here we explained about Internal Model Control (IMC). Here we explain the relationship between IMC and PID control. In conclusion, it is possible to convert from IMC to PID control while maintaining equivalent operation, and IMC has advantages that PID does not have. We will explain step by step.
First, the form of IMC is as follows.
Here, if the input to FP-1 is set to a, a can be expressed as the above equation. Next, the above can be expressed as follows.
To confirm that this is equivalent, simply confirm that the input a to FP-1 is the same equation.
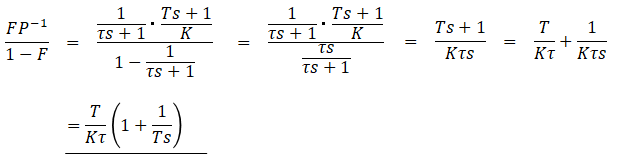
Furthermore, this can be transformed as follows. For how to combine transfer functions, see here.
Here, define the control object P and filter F as follows.
From the above,
The general system for PID control is as follows, so it can be made equivalent to PID control.
■Confirm by simulation
Compare the operation of IMC and PID by simulation. The control object P is a first-order delay system. The parameters are as follows.
T=0.5, K=1, t=0.1
The design results in Scilab are as follows.
The simulation results are as follows. The control results match. You can also see that both converge properly even when a disturbance is applied to the controlled object at 2 seconds.
■Advantages of IMC
From the above comparison results, PID control can produce similar control results to IMC, but the advantages of IMC are listed below.
①You can determine the responsiveness just by adjusting the filter constant t, making gain setting easy.
②No windup measures are required.
However, ② can also be handled by the applied form of PID control, speed-type PID control.
<What is windup>
Details are explained in the speed-type PID control section above. When actually controlling a controlled object, the amount of operation may be limited due to constraints on the controlling controller.
If PID control does not converge to the target value, the correction value will continue to accumulate as an I term. This state is called windup. To prevent this, various measures are required for PID control,
but this is not necessary with IMC control. We will verify it in detail. The control model is as follows, and the input to the controlled object is limited to 0.9.
The simulation results are as follows. Since the input to the controlled object is limited, both IMC control and PI control do not track the target value, but what is important to note is the behavior when the input changes, and PI control is slow to track.
This is because the I term of PI control is integrated.