PI-D type control (Derivative leading PID) |
|||||||||||
・First-order delay + P controll ・2nd order delay + PID
|
・In English
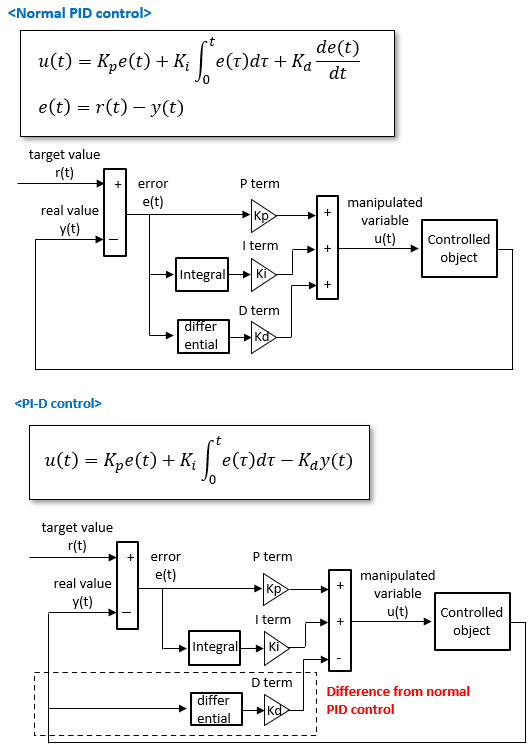
■What is PI-D control (derivative leading PID)?
PI-D control (derivative leading PID) is an application of PID control, in which the derivative of the actual value is added as a derivative term.
Normal PID control applies a gain according to the deviation between the target value and the actual value.
This control does not use the target-actual deviation as an input to the derivative term, but uses the actual value as an input to the derivative term.
By doing this, a sudden change (kick) in the manipulated variable due to a sudden change in the derivative term can be suppressed.
The comparison is as follows. For PI-D, the derivative term is a subtraction ■Design of PI-D control
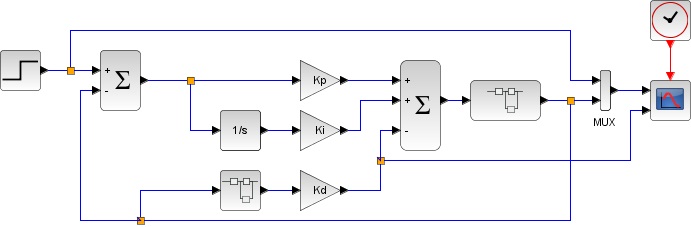
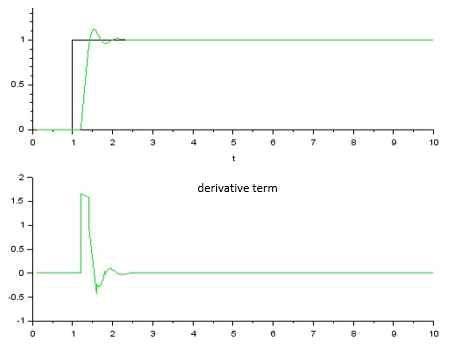
The design result in Scilab is as follows. The contents of the controlled object and the differentiator are here.
|
|
|||||||||