■Chien, Hrones and Reswick's Step response method for PID controller
One of the methods to set the gain of PID control is the Chien, Hrones and Reswick's step response method.
This is a method that can experimentally determine the gain when the characteristics of the controlled object cannot be expressed by a physical model.
In addition, this method is limited to the control target of localization*, which has a dead time + 1st-order delay.
* Localization is the property that when an input value is determined, the output value is determined accordingly.
On the other hand, the property that the output value is not uniquely determined even if the input value is determined is called non-localization.
An example of non-localization is a controlled object that includes an integrator.
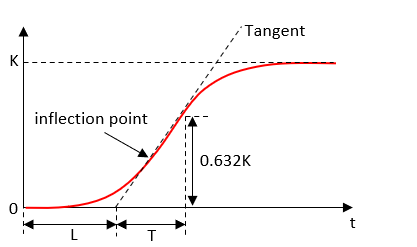
The gain is determined from the output characteristics when a certain step input is given.
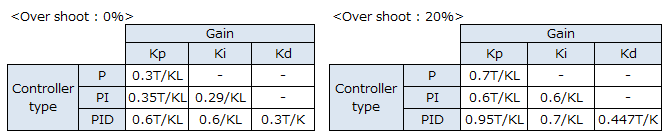
In the above figure, when the dead time is L, the time constant is T, and the convergence value is K, the gain is as follows.
If this gain is set based on the following formula, the gain will be different, but the result will be the same.
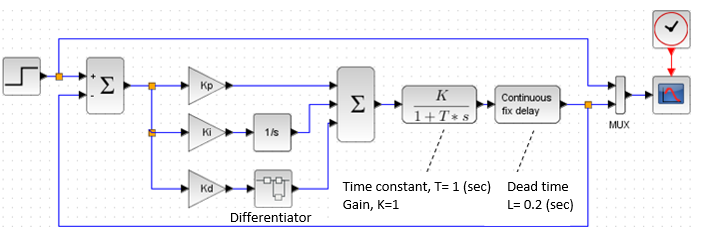
■Simulation result of step response method by Scilab.
When a step input of magnitude 1 is given, the parameters are as follows because the control target
waste time L = 0.2 seconds,
time constant T = 1 second,
gain = 1.
<Parameters for 20% overshoot>
Kp = 0.95/0.2 = 4.75
Ki = 0.7/0.2 = 3.5
Kd = 0.447
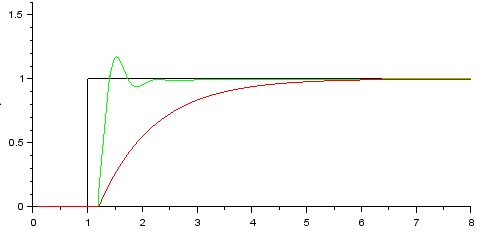
The design results and simulation results of PID controler are as follows.
The differentiator used here is not the standard one of Scilab, but it is like this. The reason is explained here.
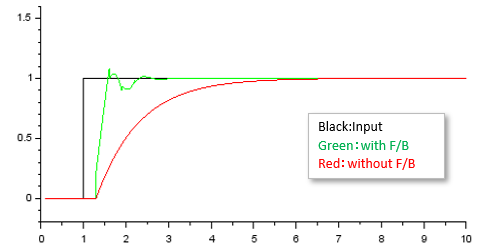
Looking at the results, the convergence was improved by performing F/B. It has a slightly distorted shape.
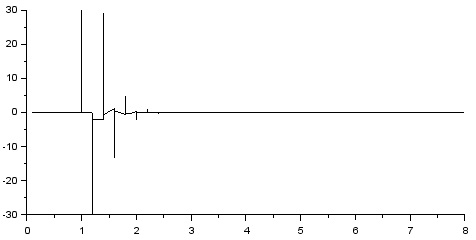
This is affected by the differentiating operation, and if you check the value of the above-mentioned differentiator, it becomes a large value when the input value to the differentiator changes.
<Differentiator output result>
When the input value suddenly changes in this way, the operation amount suddenly changes due to the influence of the differential operation, which is called "kick".
As one of the countermeasures, reduce the differential gain.
The result when Kd = 0.45 to 0.25 is as follows, it became a smooth shape.