CAN通信, LIN通信とは 仕組みと違い |
|||||||
・シリアル通信の仕組み ・単向、半二重、全二重通信 ・差動信号伝送 ・シングル/マルチマスタ方式 ・クロック同期式/調歩同期式 ・USB ・CAN , LIN ・SENT ・SPI ・Ethernet ・PLC, 重畳回路 ・パリティ,チェックサム,CRC ・データ転送速度 ・ドメイン, DNSサーバ ・通信プロトコル ・メッセージ認証, デジタル署名 ・SSL/TLS ・VPN ・無線通信 |
・In English
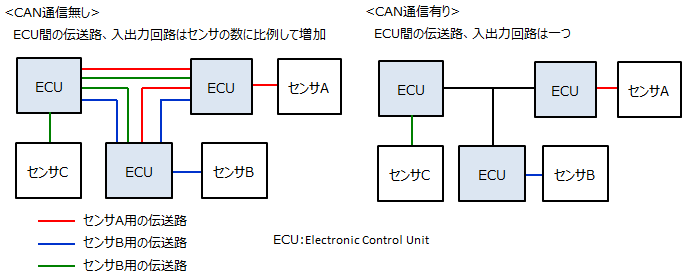
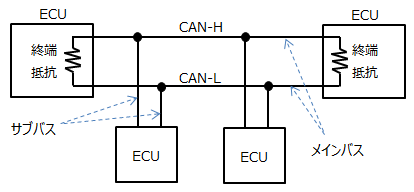
■CAN通信とは
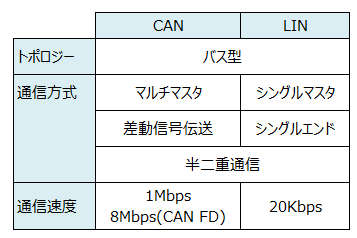
CANとはController Area Networkの略で、主に自動車用の通信ネットワークとして用いられるシリアル通信の規格のことで、
ホストコンピュータなしでユニット間の通信を行うP2P(ピアツーピア)となっております。通信速度は最高1Mbps程度ですが、
CAN FD(CAN with Flexible Data rate)の様に、より高速(8Mbps)な通信方法もあります。
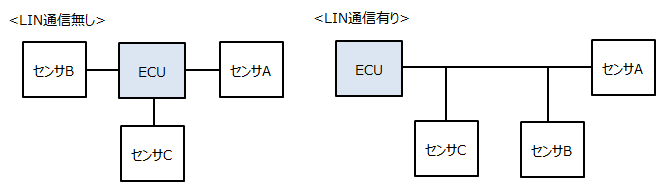
■LIN通信とは
LINはLocal Interconnect Networkの略で、CANと同様、主に自動車用の通信ネットワークとして用いられるシリアル通信の規格です。CAN通信に比べ通信速度は落ちるが安価で実現できるのが特徴。
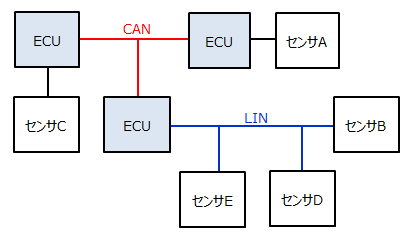
複数のセンサを共通のハードワイヤで一つのECUへ入力する事でコスト削減が可能です。CANはECU間の通信、LINはECUとセンサ間の通信に用います。 ■CAN通信とLIN通信の違いまとめ
CANとLIN通信の構成例は以下。
サブチャンネルあります。⇒ 何かのお役に立てればと
|
|
|||||