Returns the gain matrix K when eigenvalues are given for the characteristic equation below.
However, (A,B) must be controllable.
■Function
K=ppol(A,B,poles)
K: Gain matrix
A,B: Matrix
pole: Eigenvalue
■Example①
This is a useful function to use when calculating feedback gain in state feedback control of modern control.
Consider the following system.
Here, the characteristic equation of the above system is equal to (1), so this function can be used.
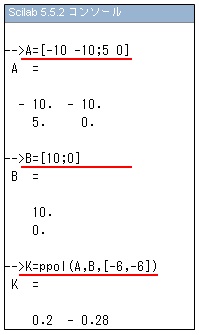
Here, we will find the gain when the eigenvalue is a multiple root of -6. The command input on the console is the red line part below.
The gain was output as 0.2, -0.28. The results of the simulation with this gain are explained here.
■Example②
Find the feedback gain h when the characteristic equation is as follows.
Here, A and C are as follows.
The input should be as shown in red below. Please note that it is written as A', C'.
Note that this characteristic equation is the observer state equation explained here.