■How to derive the equation of state for a first-order system (RL circuit)
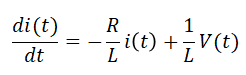
The method for deriving state equations used in modern control will be explained using the following RL circuit, which is a first-order system.
A first-order system can be described by a differential equation with a first-order differential, and an n-order system is a differential equation with an n-order differential.
■Derivation of state equation and output equation
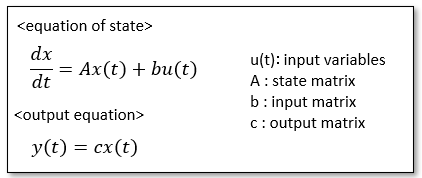
The general equation is as follows.
Comparing this with the above equation and transforming equation (1), we get the following.
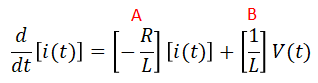
The form expressed by the determinant of the above equation is the state equation below. A and B correspond to A and B in the general formula above, respectively.
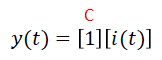
The output equation is as follows, and the output y(t) is defined as i(t) multiplied by C.
In this case, C=1, but the output y(t) may be defined as another parameter that has a certain relationship to i(t).
C may be set to a value calculated from the actual machine rather than a physical formula.
If you look at it this way, you might think that there is no need to express it in a matrix.
You may think so in the case of a simple expression like this, but when you have a quadratic system or a complex expression, you can understand its convenience.
■Expressing the state equation as a block diagram
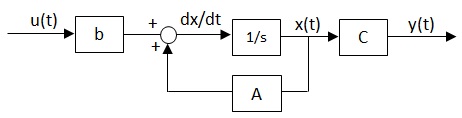
The general system of the above equation of state can be expressed as a block diagram as follows.
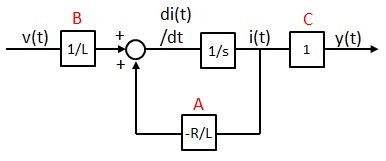
The equation of state in the above electric circuit can be expressed as a block diagram as follows.
■Check simulation results with Scilab
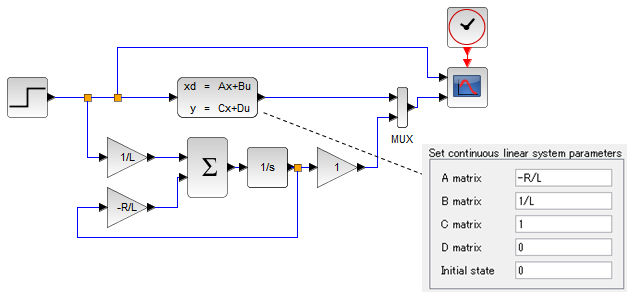
When designed with scilab, it becomes the following. There are two patterns available.
The upper block with formulas represents the state equation, and you can achieve the same behavior as the lower block by simply entering parameters.
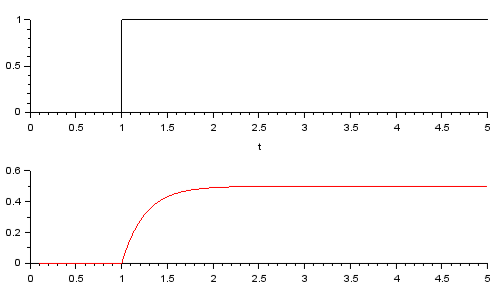
The simulation results are as follows. L=0.5, R=2. Both patterns have the same behavior.