|
・In Japenese
[premise knowledge]
・PID control
・Motor differential equation
・Incomplete differentiation
■What is a Disturbance Obserber (DOB)?
A disturbance observer is a control method that speeds up the response when a disturbance occurs by estimating the disturbance of the controlled object and feeding it back to the controller.
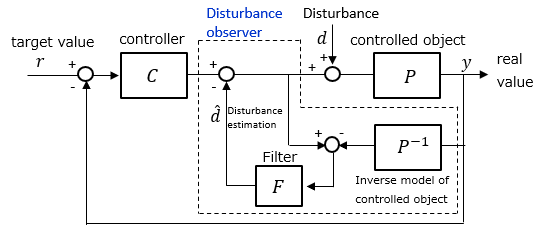
<Basic form 1>
The block diagram is below. If you input the output value of the controlled object P to the inverse model of P, you can find out what value was input to P.
If there is no disturbance, it should match the output value of the controller, but if there is a difference, it will be the value input to P as a disturbance, so if you subtract that amount from the output of the controller, you can remove the disturbance component.
Sincethe inverse model often contains differentiation and is susceptible to noise, so a low-pass filter is used. This is called the incomplete differentiation
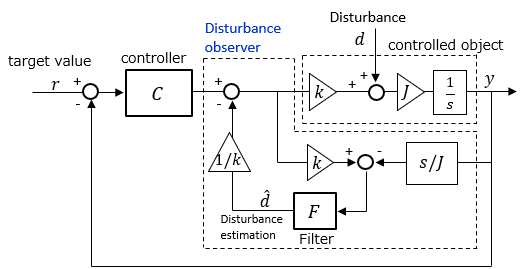
<Basic form 2>
When disturbance is included in the controlled object, it is as follows. The concept is the same as for basic form 1.
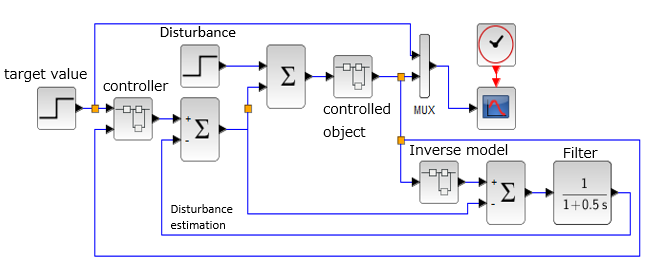
■Example of disturbance observer
The controller simulates the behavior of the disturbance observer when the control object is a motor under PID control.
Here are the contents of each of Scilab's superblocks.
The Scilab program file is below.
OBS.zip
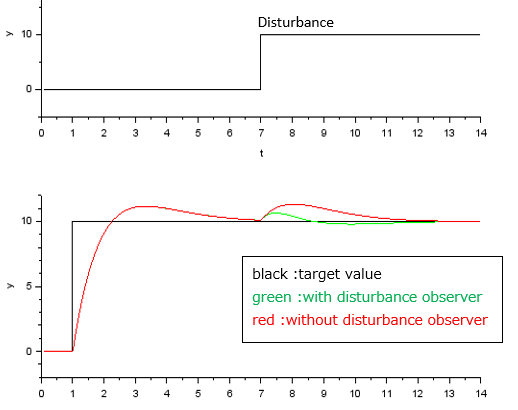
■Simulation result of disturbance observer
The results are as follows. It can be seen that the observer converges quickly to the target value even if a disturbance occurs.
■Advantages and Disadvantages of Disturbance Observers
<Advantages>
・Responsiveness to disturbance can be improved.
・Can be optionally attached or detached to existing feedback controllers.
<Disadvantages>
・It is necessary to model the control object.
In other words, the advantage of PID control that does not need to know the characteristics of the controlled object is lost.
・Since it uses differentiation, it may become unstable. However, the stability can be improved by applying a filter to incomplete differentiation.
|