State observer |
|||||||||||
・RC Circuit
|
・In Japenese
■Problems with state feedback
I explained about state feedback control here, but there is a problem.
It means that state variables cannot always be measured.
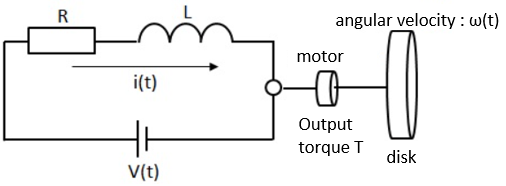
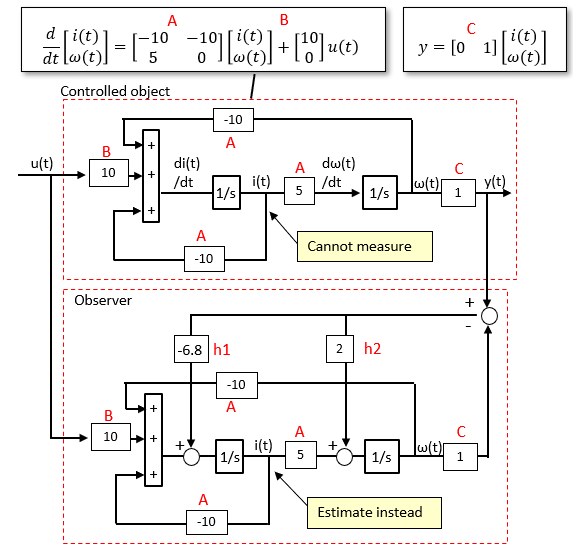
For example, in the following system, if you want to control the rotation speed of the motor to the target position, you need information on the actual rotation speed and current value.
However, if the current value cannot be actually measured due to various reasons, the State Observer is useful.
■What is a State Observer?
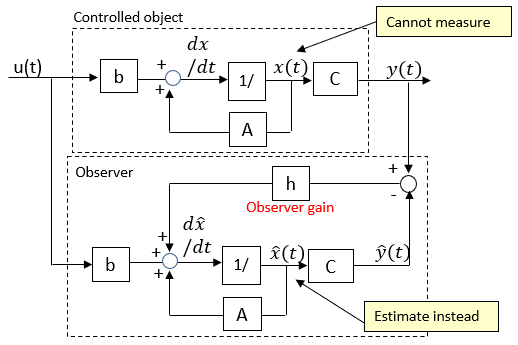
The simple idea of a state observer is to estimate unmeasurable information with a model from other measurable information.
The shape of the observer is as follows. Since the observer is a function to estimate the state, it is not possible to feed back the controlled object by this alone.
The method of state feedback using the state observer is explained here. ■ Observer gain settings
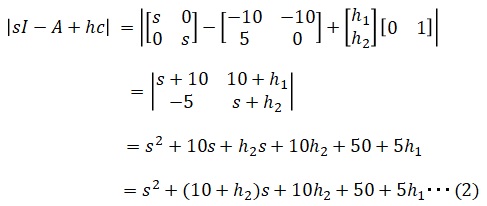
Use the pole placement method used to set the state feedback gain.
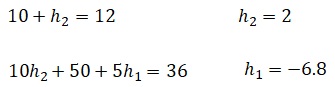
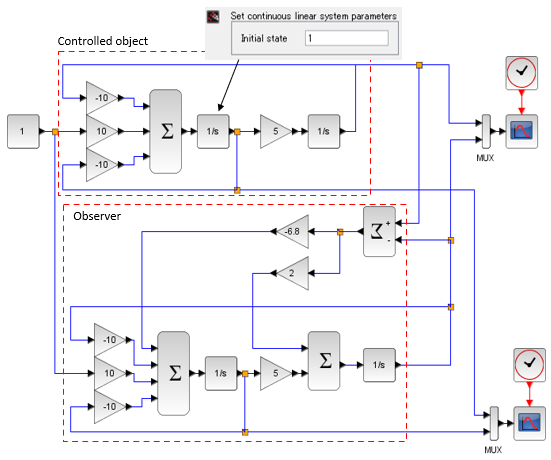
From (6), find h where the root of the characteristic equation is negative below. ■Design a state observer with Scilab
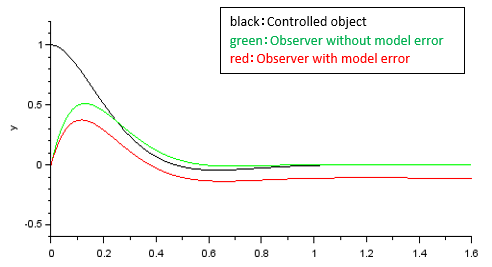
The above system is represented by a block diagram below. ■State observer simulation results
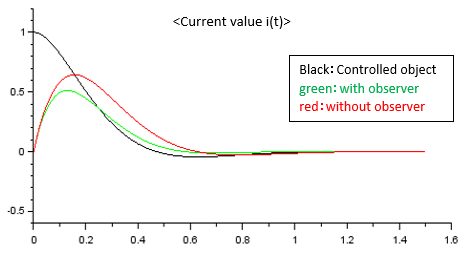
as below. You can see that the observer matches the value of the controlled object earlier. ■Observer benefits. More accurate than the reverse model
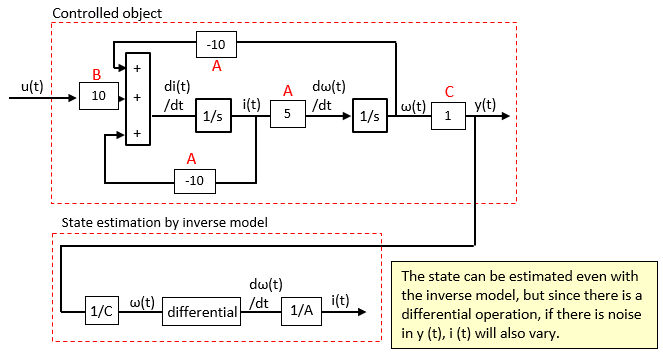
An observer estimates a state quantity that cannot be measured, but there is another way to estimate the state quantity.
It is a method of calculating back from the output value as follows. This method may seem good at first glance, but it is known that the output value often contains noise, and it is difficult to obtain the correct state quantity if differentiation is performed in that state.
If an observer is used, the state quantity can be estimated accurately even if there is noise in the output value. ■Observer's shortcomings. Does not correct modeling error
The observer does not correct the modeling error, so if there is an error in the model, the state quantity cannot be estimated correctly.
The simulation result when the value of B of the above observer is changed from 10 to 8 is shown. You can see that it does not match the controlled object.
|
|
|||||||||